

行業新聞
人機交互機器視覺應用潛力比你想象的要大
日期:2017-03-29
來源:三姆森科技
香港中文大學天石機器人研究所所長劉云輝教授自本科起就從事機器人研究,至今已經有數十年的研發經驗。在 ACT Lab 和深圳灣聯合舉辦的“機器人控制系統和視覺的融合”活動中,劉云輝教授向慕名而來的創業者們分享了自己在機器人領域的所思所得。
梳理本次演講的重點和要點,帶領讀者了解機器視覺領域最前沿的研究課題。
三維視覺技術大有可為
實時三維視覺技術應用廣泛,在機器控制、物件抓取和人機交互等技術領域,都不能脫離實時三維視覺技術。正因如此,該技術有著巨大的商業潛力。據報道,預計 2020 年,全球 3D 成像系統市場預計能達到 536 億人民幣,年度復合增長率 39.4%,尤其是在體育醫學、矯形外科學、人體測量等醫學領域,對 3D 成像技術的需求更為強烈。
劉云輝教授研究實時三維視覺技術多年,他認為:“研究三維視覺技術,歸根結底,就是要理解什么是視覺信息,然后將這些視覺信息在實際的場景中應用起來。”他研發的基于結構光的雙目視覺技術具有精度高、測量速度快、動態拍攝等特點,并且已經應用在商業化的 3D 成像系統中。
工廠叉車也要自動駕駛
目前,大型工廠的室內物件搬運 70% 靠的是人工駕駛叉車進行操作,但從事重體力勞動工人的人工成本上升和人力資源的短缺,對很多行業造成重大影響,移動機械的自動化改造需求迫切。

劉教授表示,目前為了保證安全性,移動器械的速度并沒有做得太快。不過,制造業、建筑業、采礦業、物流業等領域對室內移動器械自動駕駛有強烈的需求,所以,該項技術在未來會有很大的發展空間。
“軟”“硬”兩手抓
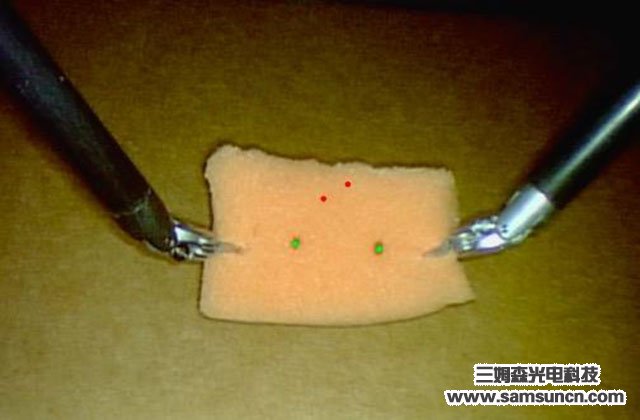
機器人或者機械臂所抓取的物件基本上都是剛體,很少能對變形體進行抓取。不過,在日常生活中,很多物件并不是棱角分明并且內部結構堅硬的剛體,而是以柔性體的形式存在,比如日常所穿的衣服、吃的食物、線材、柔性 PCB 以及人體組織。
劉云輝教授認為,在需要操作形變體的領域中,醫療健康對該技術的需求最強烈并且對操作的精準度也更高。劉教授結合自身的研發經驗補充說:“醫療手術機器人的研發主要有三個挑戰:首先是安全性,醫療手術中不能容許半點差錯,所以如何保證手術機器人的安全性,以及與操作醫師的有效配合是重中之重;保證安全性后,機器人如何在柔軟的體內進行解剖和組織切除,機械結構如何設計,視覺系統如何設計,就是研究人員面臨的第二大挑戰;第三,如何讓不懂機器人技術的醫生快速上手操作,人機交互如何設計,則是第三個挑戰。”
人形才是最適的人機交互方式
我們周圍的生活環境是以人類的行為方式為基準而建立的,人類可以相當輕松地上樓梯、開門、適應各種地形,所以說最好的機器人形態就是人形機器人。同理,人和人的溝通是我們最習慣的交互方式,所以最好的人機交互就是機器人以“人”的方式進行交互。

劉云輝教授認為,相對于語言和表情,讓機器人模擬人的動作在技術上更容易實現,通過用體感設備讓機器人模仿人類的肢體動作,學習人類的行為模式,增強機器人的智能,并最終實現自然的人機交互。
