

技術文章
光學鏡頭物理參數介紹
1.1 放大倍率(X)
光學器件的放大倍率X用于描述圖像尺寸(h’)與物體尺寸(h)之比:
X=h’/h
一般在鏡頭搭配工業相機成像時,圖像尺寸就是相機芯片的物理尺寸(h*v)
h = 芯片橫向像元個數*像元邊長
v = 芯片縱向像元個數*像元邊長
物體尺寸(H*V)就是整個鏡頭搭配相機成像的視野(FOV)
H = h/X
V = v/X
一般的工業鏡頭沒有放大倍率這個參數,因為一般的工業鏡頭在不同的工作距離使用時有著不同的放大倍率,這個時候,我們需要根據鏡頭的焦距(f)和鏡頭的工作距離(WD)來計算。
工作距離WD、放大倍率(X)和焦距(f)之間的一個有用關系如下: WD=f(X-1)/X
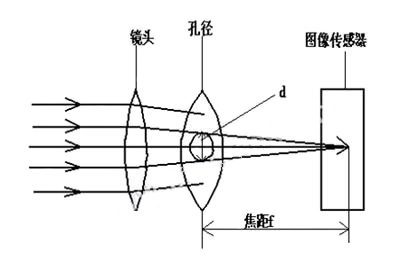
1.2 焦距(f)
焦距也稱為焦長,是光學系統中衡量光的聚集或發散的度量方式,指從透鏡中心到光聚集之焦點的距離。亦是照相機中,從鏡片光學中心到底片、CCD或CMOS等成像平面的距離。具有短焦距的光學系統比長焦距的光學系統有更佳聚集光的能力。
一般的工業鏡頭都有著固定的焦距參數,這個參數是衡量鏡頭最重要的指標。
行業內常見的焦距種類為:4mm\6mm\8mm\12mm\16mm\25mm\35mm\50mm\75mm\100mm等,根據不同的使用距離,配合不同種類的相機、不同的視場(FOV)的需求,我們可以計算需要使用的焦距。計算方式參照如上。
不同的焦距,不同的物距搭配同樣的相機能出現同樣的視場,在這種情況下該如何選擇呢?
一般建議不要使用小焦距在小物距狀態下的成像方式,這種方式會導致圖像出現比較大的物理畸變。
1.3 景深(DOF)
景深(DoF)是物體在容許對焦情況下的最近位置與最遠位置之間的范圍。
景深的粗略估計由以下公式給出:
DoF[mm]=WF/# ?P[μm]?k/M^2
其中,p是傳感器的像素尺寸,M是鏡頭放大倍率,k是取決于具體應用的無量綱參數。
從以上公式可以看出,鏡頭的景深和光圈有著緊密的關系,且鏡頭的景深和F#是成正比關系,那么可以看出,當鏡頭有著比較低的通光量時,它會有比較大的景深,反之亦然。
1.4 分辨率
分辨率是衡量鏡頭成像清晰度的一個重要的參數。
通常,分辨率由頻率決定,而頻率則通過每毫米線對數(lp/mm)來測量,但鏡頭的分辨率不是一個絕對數值。交替的黑白方形之間的關系通常被稱為線對。在給定的分辨率下,將兩個方形顯示為單獨實體的能力取決于灰度等級。方形之間的灰度距離以及空間越大(如下圖所示),解析方形的能力就越強。這種灰度分離被稱為對比度(在指定頻率下)。給定的空間頻率以lp/mm為單位。因此,在比較鏡頭以及確定給定傳感器和應用的最jia選擇,以lp/mm為單位計算分辨率非常有用。
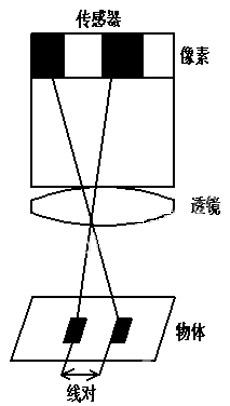
傳感器是計算系統分辨率的起點。從傳感器開始,更容易確定可滿足傳感器或其他應用需求所需的鏡頭性能。傳感器可解析的最高頻率,奈奎斯特頻率,實際是兩個像素或一個線對。
下表顯示了與某些常用傳感器上看到的像素大小關聯的奈奎斯特極限。傳感器的分辨率(圖像空間分辨率)可以通過以下公式 計算:將像素大小(μm)乘以2(創建對),然后將乘積除以1000以轉換mm :
傳感器分辨率(lp/mm)=圖像空間分辨率(lp/mm)=1000/2×像素大小(μm)
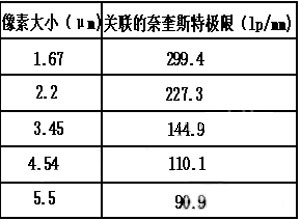
像素較大的傳感器的極限分辨率較低。像素較小的傳感器的極限分辨率較高。傳感器尺寸是指相機傳感器有效區域的大小,通常由傳感器格式大小指定。但是,準確的傳感器比例會因寬高比而有異,而且標稱傳感器格式應該僅用作指導,特別是針對遠心鏡頭和高放大倍率物鏡。傳感器尺寸可以直接根據像素大小和傳感器上的活動像素數計算。
水平傳感器尺寸(mm)=[(水平像素大小,μm)×(活動水平像素數)]/1000μm/mm
垂直傳感器尺寸(mm)=[(垂直像素大小,μm)×(活動垂直像素數)]/1000μm/mm
一般來說鏡頭成像會有物方和像方,那么鏡頭的分辨率也就分為物方分辨率和像方分辨率,一般鏡頭和相機匹配都是看像方分辨率和像素大小,視覺檢測評估精度都是在說物方分辨率。這兩個分辨率之間的關系是什么呢?
物體空間分辨率(lp/mm)=圖像空間分辨率(lp/mm)×X
一般來說,在開發應用程序時,系統的分辨率要求并未以lp/mm給定,而是以μm或英寸給定。有兩種轉換方式:
物體空間分辨率(μm)=1000(μm/mm)/[2×物體空間分辨率(lp/mm)]
或物體空間分辨率(μm)=像素大小(μm)/系統的放大倍率
1.5 對比度(銳度)
對比度描述在給定的物體分辨率下,黑色與白色的區分程度。要使圖像看起來輪廓分明,黑色細節需要顯示為黑色,白色細節必須顯示為白色(如下圖)。黑色和白色信息越趨向于中間灰色,該頻率下的對比度越低。明暗線條之間的強度差異越大,對比度越高。
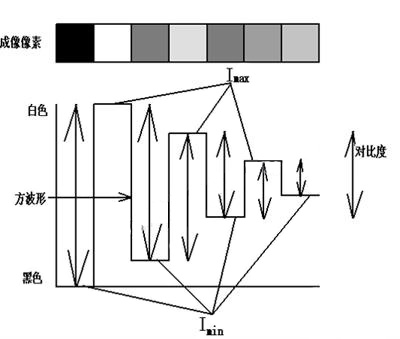
從圖中可以看到從黑色過渡為白色是高對比度,中間灰色則表明對比度較低。
可根據以下公式對給定頻率下的對比度進行計算。其中,Imax是最大強度(如果使用了相機,通常會采用像素灰度值),Imin是最小強度:
%Contrast=[(Imax-Imin)/(Imax+Imin)]×100
一個鏡頭的對比度(銳度)的大小,直接決定了視覺輪廓檢測時,邊界特征的區分精度。一般視覺輪廓檢測都是用背光照明的方式來拍攝物體,對比度的高低直接決定了圖像算法對邊緣輪廓提取的精度,它最終決定了輸出結果的精度。
1.6 光圈(F#)/數值孔徑(N.A)
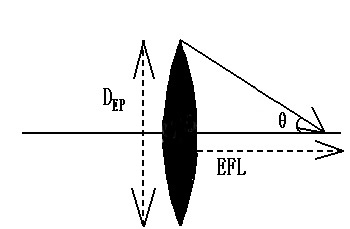
鏡頭上的F/#設置可控制多項鏡頭參數:總體光通量、景深以及在給定分辨率下產生對比度的能力。從根本上說,F/#是鏡頭的有效焦距(EFL)與有效孔徑直徑(DEP)之間的比率:
F/#=EFL/ DEP
典型的F/#值有 F/1.0、F/1.4、F/2.0、F/2.8、F/4.0、F/5.6、F/8.0、F/11.0、F/16.0、F/22.0 等。F/#值每增加一次,入射光線便會減少二分之一。如下圖所示。
大多數鏡頭都通過轉動光圈調節圈,進而開合內部的虹彩光圈來設置F/#。調節圈上標記的數字表示光通量及其關聯的孔徑直徑。這些數字經常以 21/2 的倍數增加。以21/2 位系數增加 F/#會使孔徑區域減半,有效地以2為系數來降低鏡頭的光通量。 F/#更低的鏡頭被認為速度更快,而且允許更多光線通過系統,而 F/#更高的鏡頭被認為速度較慢,并且光通量更少。
下表顯示了25mm焦距鏡頭的F/#、孔徑直徑和有效開口尺寸的示例。當設置從F/1更改為F/2,然后再從F/4更改為F/8時,每個間隔的鏡頭孔徑會對半縮小。這描述了與鏡頭 F/#增加關聯的通量減少。

光圈除了對鏡頭成像像面亮度有直接關系以外,它本身和圖像對比度、分辨率、景深都有密切關系。我們在調整鏡頭光圈的時候要綜合考慮它對整個圖像的影響。具體來說, F/#與理論分辨率和對比度極限以及景深(DOF)和鏡頭焦深直接相關。此外,它還會影響鏡頭設計的像差。隨著像素大小繼續減小, F/#將成為限制系統性能的最重要的因素,因為它與景深和分辨率成反比。在計算工作F/#的方程式中,X代表物鏡的近軸放大倍率(圖像與物體高度的比例)。注意,X越接近0(物體越接近無限遠),工作距離F/#越接近無限F/#。在工作距離較小的情況下,尤其要謹記F/#隨工作距離更改而改變。
方程式 “F/#=EFL/ DEP ”中的F/#是在無限的工作距離下定義的,其中放大倍率實際上為0,從這個意義上來講, F/#的定義是受限的。在大多數機器視覺應用中,物體與鏡頭的長度大大短于無線距離,而且以下方程式中將F/#更準確的表示為工作F/#。
( F/#)w =(1+│m│)× F/#
數值孔徑(NA)和F#一樣,都是描述鏡頭光圈的一種方式。從鏡頭錐形角或數值孔徑(NA)的角度來談論總體光通量往往更加簡單。鏡頭的數值孔徑定義為圖像空間中邊緣光線角的正弦。(如下圖所示)
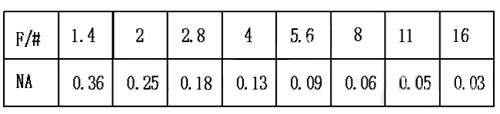
F/#和數值孔徑NA的關系式:
NA=1/[2×(F/#)]
下表顯示了鏡頭的典型F/#布局(后續每個數字都以21/2為系數增加)及其與數值孔徑的關系。
顯微鏡中尤其經常標注數值孔徑,而不是F/#,但為顯微鏡物鏡指定的數值孔徑值是在物體空間中指定的,因為在該處更容易進行光收集。另外一個情況是,無限共軛可以被認為是相反的機器視覺物鏡(聚焦于無窮遠)。
