

技術文章
機器視覺定位算法:二維圖像模式定位系統算法
日期:2018-04-25
來源:三姆森科技
機器視覺(Machine Vision),又被稱為計算機視覺或人工視覺,是用計算機模擬人眼的視覺功能,從圖像或圖像序列中提取信息,對客觀世界的三維景物和物體進行形態和運動識別。 機器視覺技術已廣泛應用于工業自動化生產線,各類檢驗和監視,視覺導航,圖像自動解釋、人機交互及虛擬現實等領域。
二維圖像模式定位系統算法
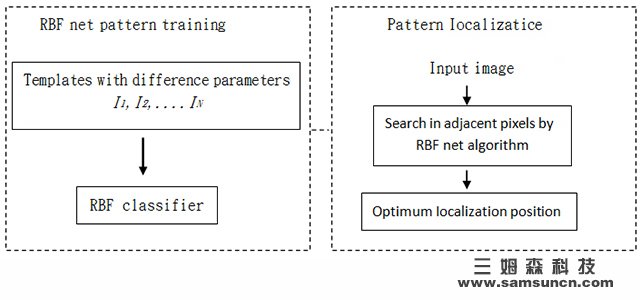
機器視覺中的二維圖像模式定位系統算法整體流程圖如圖1所示,由RBF網絡模式訓練和模式定位兩個部分組成。
徑向基函數(RBF,Radial basis function) RBF網絡為兩層MLP(Multiple Layer Propagation)提供了一種前饋結構,具有最佳逼近(Best approximation)性質,無須學習系數,學習收斂速度極快,在樣本數目多的情況下,正確率趨于穩定。故本算法中采用RBF網絡對圖像特征進行神經網絡學習訓練。
圖像特征提取
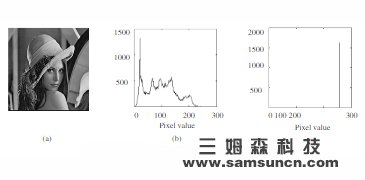
小波變換具有多分辨率特性,對原始圖像的分解呈Mallat塔式分解,具有集中信號能量的能力,小波變換后圖像的信息僅僅集中在少數幾個變換系數上,多數變換系數為零,有助于降低圖像目標小波變換的時間復雜度和空間復雜度(如圖3所示)。同時小波變換后代表圖像頂點等特征點的模極大值的范數不隨圖像的旋轉、平移和伸縮的變化而改變,故本文在小波變換的基礎上對圖像提取特征。
視覺系統獲得具有實際模式的二維圖像,記為I(x,y)。存儲在計算機內存中具有同樣模式的參考圖像(即模板)記為
 本文只考慮二維圖像變化為剛性變化的情況。
本文只考慮二維圖像變化為剛性變化的情況。
其中點集P{p1、p2、… pm}表示參考圖像W的數據,Q{q1、q2、… qn}為經過仿射變換(如平移、旋轉、縮放等)的圖像I數據。本文假設圖像I和模板W中心重合,則P與Q之間的關系可以通過公式求得
 其中s 是兩幅圖像的放大縮小比例系數,θ是旋轉角度,?x、?y分別是沿X軸,Y軸方向的位移偏移量。
其中s 是兩幅圖像的放大縮小比例系數,θ是旋轉角度,?x、?y分別是沿X軸,Y軸方向的位移偏移量。
特征提取步驟為:首先對圖像重采樣,使得其寬度和高度是2的冪次方,然后進行小波變換得到矩陣X,將X歸一化得到圖像特征矩陣Y。其中X=[x1,…,xn]T為低分辨率的小波系數組合成的矩陣,均值µ,方差σ,矩陣Y=[y1,…,yn]T為

模式訓練算法
獲得圖像特征矩陣后,對特征進行 RBF網絡學習訓練,對RBF中心的學習采用模糊聚類算法。
計算權值系數
由于本算法中RBF選用的是高斯函數,因此方差為: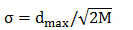
其中 M為隱含層節點數,dmax為所選取中心之間的最大距離。隱含層至輸出層單元連接權值用最小二乘法直接計算,即
 模式定位算法
模式定位算法
對背景圖像進行預處理后提取特征,用已經訓練好的RBF網絡分類器進行鄰域搜索,求得最佳匹配位置。流程圖如圖5所示。
原文鏈接:http://www.elecfans.com/lab/code/20180123621321.html
二維圖像模式定位系統算法
機器視覺中的二維圖像模式定位系統算法整體流程圖如圖1所示,由RBF網絡模式訓練和模式定位兩個部分組成。
徑向基函數(RBF,Radial basis function) RBF網絡為兩層MLP(Multiple Layer Propagation)提供了一種前饋結構,具有最佳逼近(Best approximation)性質,無須學習系數,學習收斂速度極快,在樣本數目多的情況下,正確率趨于穩定。故本算法中采用RBF網絡對圖像特征進行神經網絡學習訓練。
圖1 定位算法流程圖
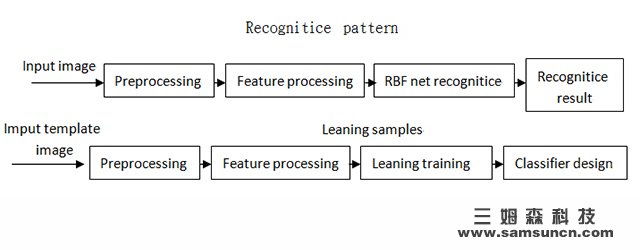
定位系統具體工作流程圖如圖2所示。先設定訓練模式,對模板圖像進行預處理,濾除干擾、噪聲后再經特征提取得到訓練樣本,對樣本進行學習,提供分類決策。在待識別模式中對待識別圖像同樣經過預處理、特征提取后,用訓練模式中的分類器中提取的分類決策進行RBF網絡識別,得到結果。若分類器不能提供目前的分類決策,則得到錯誤檢測,需要更新訓練模式,直到重新獲得正確的分類決策。其中最重要的一個環節就是特征提取與選擇,影響到最后的定位精度。
圖2 RBF神經網絡特征識別系統工作流程圖
圖像特征提取
小波變換具有多分辨率特性,對原始圖像的分解呈Mallat塔式分解,具有集中信號能量的能力,小波變換后圖像的信息僅僅集中在少數幾個變換系數上,多數變換系數為零,有助于降低圖像目標小波變換的時間復雜度和空間復雜度(如圖3所示)。同時小波變換后代表圖像頂點等特征點的模極大值的范數不隨圖像的旋轉、平移和伸縮的變化而改變,故本文在小波變換的基礎上對圖像提取特征。
圖3 小波變換前后圖像的直方圖比較
視覺系統獲得具有實際模式的二維圖像,記為I(x,y)。存儲在計算機內存中具有同樣模式的參考圖像(即模板)記為
其中點集P{p1、p2、… pm}表示參考圖像W的數據,Q{q1、q2、… qn}為經過仿射變換(如平移、旋轉、縮放等)的圖像I數據。本文假設圖像I和模板W中心重合,則P與Q之間的關系可以通過公式求得
特征提取步驟為:首先對圖像重采樣,使得其寬度和高度是2的冪次方,然后進行小波變換得到矩陣X,將X歸一化得到圖像特征矩陣Y。其中X=[x1,…,xn]T為低分辨率的小波系數組合成的矩陣,均值µ,方差σ,矩陣Y=[y1,…,yn]T為
模式訓練算法
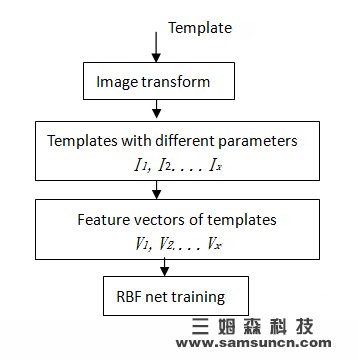
獲得圖像特征矩陣后,對特征進行 RBF網絡學習訓練,對RBF中心的學習采用模糊聚類算法。
圖4 定位算法中模式訓練流程圖
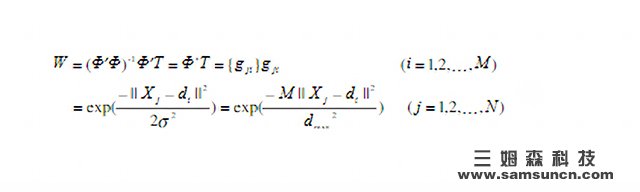
計算權值系數
由于本算法中RBF選用的是高斯函數,因此方差為:
其中 M為隱含層節點數,dmax為所選取中心之間的最大距離。隱含層至輸出層單元連接權值用最小二乘法直接計算,即
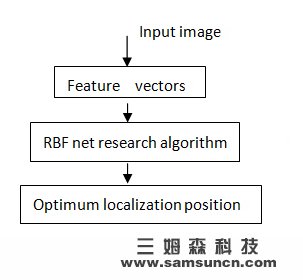
對背景圖像進行預處理后提取特征,用已經訓練好的RBF網絡分類器進行鄰域搜索,求得最佳匹配位置。流程圖如圖5所示。
圖5 定位算法中模式定位流程圖
原文鏈接:http://www.elecfans.com/lab/code/20180123621321.html
